








未來戰場新常态:有人/無人機協同作戰
摘 要:有人/無人機協同將(jiāng)成(chéng)爲無人平台在未來戰場運用的新常态。随著(zhe)武器裝備的智能(néng)化、自主化水平不斷提高,人與機器之間的任務剖分會(huì)發(fā)生明顯改變,人會(huì)逐漸把大量重複且确定的工作交給機器完成(chéng),而自己隻參與重要決策環節。有人/無人機協同作戰是分布式協同作戰理念指導下應用較爲廣泛的典型作戰模式,通過(guò)有人平台和無人機之間分工協作,形成(chéng)優勢互補,達到“1+1>2”的作戰效果。本文對(duì)近些年美軍在有人/無人機協同領域的項目進(jìn)行深入分析,總結了有人/無人機協同需要發(fā)展的關鍵技術,并對(duì)有人/無人機協同作戰的典型作戰場景和作戰流程進(jìn)行研究,提出對(duì)有人/無人機協同作戰領域未來發(fā)展的思考。
關鍵詞: 有人/無人協同;無人機
引 言
有人/無人機協同作戰是將(jiāng)體系能(néng)力分散到有人和無人平台之上,通過(guò)體系内各平台之間的協同工作,一方面(miàn)使作戰能(néng)力倍增,另一方面(miàn)利用無人機實現對(duì)有人機的保護,大幅提高體系的抗毀傷能(néng)力和魯棒性。有人/無人協同作戰能(néng)夠實現有人和無人平台之間的優勢互補,分工協作,充分發(fā)揮各自平台能(néng)力,形成(chéng)“1+1>2”的效果。有人機與無人機在空中作戰將(jiāng)長(cháng)期保持控制與被(bèi)控制的關系[1],随著(zhe)無人智能(néng)化水平的不斷發(fā)展,有人機與無人機協同作戰樣(yàng)式、協同形态和相關技術也在不斷演進(jìn)。因此,發(fā)展有人/無人機協同編隊提高作戰效能(néng)是現階段的明智選擇。
本文主要研究美軍在有人/無人機協同領域的項目和技術突破情況,給出對(duì)于有人/無人機未來發(fā)展的思考。本文組織結構如下:第1章對(duì)美軍近些年在有人/無人機協同方向(xiàng)典型項目進(jìn)行重點分析;第2章主要介紹了有人/無人機協同的關鍵技術;第3章是有人/無人機典型作戰場景和場景模式;第4章是對(duì)有人/無人協同未來發(fā)展方向(xiàng)的展望;最後(hòu)對(duì)本文進(jìn)行總結。
1 美軍有人/無人機協同發(fā)展現狀分析
美軍將(jiāng)有人/無人協同列爲“第三次抵消戰略”五大關鍵技術領域之一。有人/無人協同概念最早出現于上世紀60年代,指有人與無人系統之間爲實現共同作戰任務目标建立起(qǐ)聯系,用于描述平台互用性和共享資産控制。近些年,DARPA及各軍兵種(zhǒng)在有人/無人機協同領域開(kāi)展了大量研究工作,主要從體系架構、指揮控制、通信組網以及人機交互四個方面(miàn)重點發(fā)展。
1.1 體系架構
爲了探索确保美國(guó)空中優勢的新方法,2014年,DARPA發(fā)布體系集成(chéng)技術和試驗(SoSITE)項目公告。該項目目标是探索一種(zhǒng)更新、更靈活的方式,將(jiāng)單個武器系統的能(néng)力分散到多個有人與無人平台、武器上,尋求開(kāi)發(fā)并實現用于新技術快速集成(chéng)的系統架構概念,無需對(duì)現有能(néng)力、系統或體系進(jìn)行大規模重新設計。SoSITE項目計劃運用開(kāi)放式系統架構方法,開(kāi)發(fā)可無縫安裝、即裝即用,并能(néng)快速完成(chéng)現代化升級的、可互換的模塊和平台,使得新技術的集成(chéng)整合更容易、更快速。如圖1所示,通過(guò)開(kāi)放式系統架構方法實現空中平台關鍵功能(néng)在各類有人/無人平台間的分配,包括電子戰、傳感器、武器系統、作戰管理、定位導航與授時(shí)以及數據/通信鏈等功能(néng)。

圖1 SoSITE概念圖
2017年,美軍在SoSITE分布式發(fā)展思路的基礎上,進(jìn)一步提出了“馬賽克戰”的概念,更加強調不同平台之間動态協同,從平台和關鍵子系統的集成(chéng)轉變爲戰鬥網絡的連接、命令與控制。通過(guò)將(jiāng)各類傳感器、指揮控制系統、武器系統等比作“馬賽克碎片”,通過(guò)通信網絡將(jiāng)各個碎片之間進(jìn)行鉸鏈,形成(chéng)一個靈活機動的作戰體系,解決傳統裝備研發(fā)和維護成(chéng)本高、研制周期長(cháng)的問題。
1.2 指揮控制
針對(duì)有人/無人機協同的指揮控制,美軍重點研究強對(duì)抗/幹擾環境下的有人機與無人機協作執行任務的方法,形成(chéng)分布式的指控管理能(néng)力。
2014年,DARPA提出“拒止環境中協同作戰”(CODE)項目。“CODE”的目标是使配備“CODE”軟件的無人機群在一名有人平台上任務指揮官的全權監管下,按照既定交戰規則導航到目的地,協作執行尋找、跟蹤、識别和打擊目标的任務[2,3]。CODE項目通過(guò)開(kāi)發(fā)先進(jìn)算法和軟件,探索分布式作戰中無人機的自主和協同技術,擴展美軍現有無人機系統在對(duì)抗/拒止作戰空間與地面(miàn)、海上高機動目标展開(kāi)動态遠程交戰的能(néng)力。
CODE項目分爲三個階段,
第一階段從2014年到2016年年初,内容包括系統分析、架構設計和發(fā)展關鍵技術,完成(chéng)系統需求定義和初步系統設計;
第二階段從2016年年初到2017年年中,洛馬和雷神公司以RQ-23“虎鲨”無人機爲測試平台,加裝相關軟硬件,并開(kāi)展了大量飛行試驗,驗證了開(kāi)發(fā)式架構、自主協同規劃等指标;
第三階段從2018年1月開(kāi)始,測試使用6架真實無人機以及模拟飛機的協同能(néng)力,實現單人指揮無人機小組完成(chéng)複雜任務。
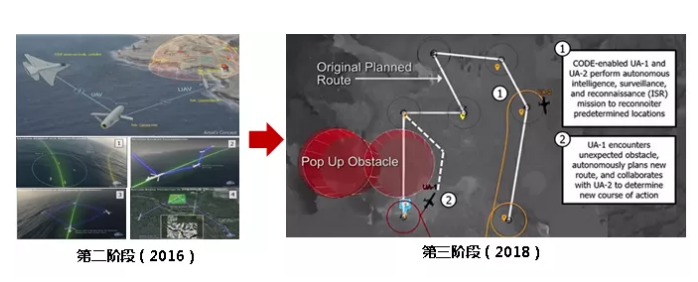
圖2 “拒止環境中協同作戰”項目
2014年,DARPA提出“分布式戰場管理”(DBM)項目。項目背景是未來的對(duì)抗性空域,協同作戰的飛機可能(néng)需要限制通信以免被(bèi)對(duì)手發(fā)現,或者會(huì)被(bèi)對(duì)方幹擾而無法交換信息,這(zhè)將(jiāng)嚴重影響有人/無人編隊作戰能(néng)力,爲此,DBM項目的目标是使作戰編隊即使在受到幹擾的情況下也能(néng)繼續執行任務。
- 2014年啓動第一階段,通過(guò)發(fā)展先進(jìn)算法和軟件,提高分布式空戰任務自适應規劃和态勢感知等能(néng)力,幫助履行戰場管理任務的飛行員進(jìn)行快速且合理的決策,以在強對(duì)抗環境下更好(hǎo)地執行複雜作戰任務。
- 2016年5月,DARPA向(xiàng)洛馬公司授予1620萬美元的項目第二階段合同,設計全功能(néng)決策輔助軟件原型,幫助策劃有人機和無人機參與的複雜空戰。
- 2018年1月,DARPA已向(xiàng)BAE系統公司授予DBM項目第三階段合同,前兩(liǎng)階段發(fā)展的成(chéng)果能(néng)讓有人/無人機編組在幹擾環境中飛行,具備回避威脅和攻擊目标的能(néng)力。圖3是DBM項目的能(néng)力驗證環境。
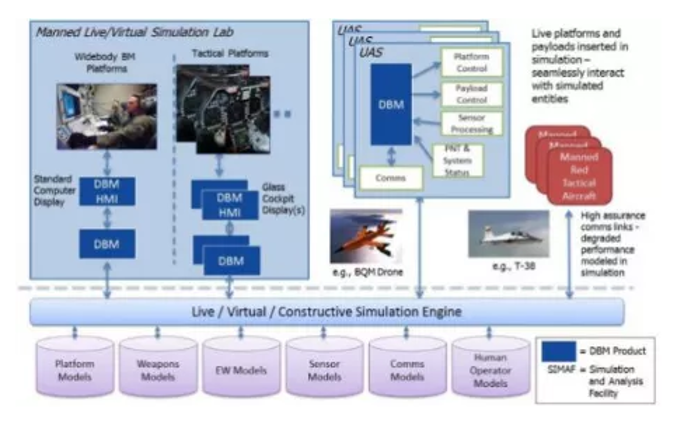
圖3 “分布式作戰管理”能(néng)力驗證環境
1.3 通信組網
有人平台和無人平台通過(guò)通信網絡進(jìn)行連接,有人/無人機協同能(néng)力形成(chéng)是以平台之間的互聯互通爲基本前提的。協同任務一方面(miàn)對(duì)通信網絡的帶寬、時(shí)延、抗幹擾/毀傷、低探測等性能(néng)提出了新要求,另一方面(miàn)通信組網應能(néng)适應傳統平台的異構網絡以及未來新型/改進(jìn)型網絡。
“中平台間的通信能(néng)力對(duì)抗環境中的通信”(C2E)項目通過(guò)發(fā)展抗幹擾、難探測的通信網絡技術,确保在使用相同射頻和波形的飛機之間開(kāi)展不受限制的通信,以應對(duì)各種(zhǒng)頻譜戰威脅。
DARPA在2015年發(fā)布 “滿足任務最優化的動态适應網絡”(DyNAMO)項目,通過(guò)開(kāi)發(fā)網絡動态适應技術,保證各類航空平台在面(miàn)對(duì)主動幹擾時(shí),能(néng)在一定安全等級下進(jìn)行即時(shí)高速通信,C2E項目的硬件成(chéng)果被(bèi)用于該項目的演示驗證,保證原始射頻數據在目前不兼容的空基網絡之間進(jìn)行通信,爲有人/無人機協同體系中異構平台之間的實時(shí)數據共享奠定了基礎。

圖4 美軍現有主要空基網絡示意圖
1.4 人機交互
CODE等項目在有人/無人機協同的人機交互上也做了大量工作。此外,美軍陸軍于2017年完成(chéng)“無人機操作最佳角色分配管理控制系統(SCORCH)”研發(fā)。如圖5所示,“SCORCH”系統包含無人機的智能(néng)自主學(xué)習行爲軟件以及高級用戶界面(miàn),提供了獨特的協同整合能(néng)力,將(jiāng)人機交互、自主性和認知科學(xué)領域的最新技術融合到一套整體作戰系統中。系統界面(miàn)針對(duì)多架無人機控制進(jìn)行了優化,設有具備觸摸屏交互功能(néng)的玻璃座艙、一個配備專用觸摸顯示屏的移動式遊戲型手動控制器、一個輔助型目标識别系統以及其他高級特性。“SCORCH”負責多架無人機的任務分配,并在達到關鍵決策點的時(shí)候向(xiàng)空中任務指揮者發(fā)出告警,允許單一操作者同時(shí)有效控制三個無人機系統并浏覽它們傳回的實時(shí)圖像。

圖5 無人機操作最佳角色分配管理控制系統
2 有人/無人機協同關鍵技術分析
2.1 開(kāi)放式系統架構技術
有人/無人機協同包含多種(zhǒng)作戰平台,如果不同的作戰平台上采用差異較大的技術體制,將(jiāng)緻體系集成(chéng)難度劇增。開(kāi)放式系統架構正是爲了解決該問題進(jìn)行設計的,推動采辦和商業模型遠離傳統煙囪式開(kāi)發(fā)模式,具有可移植、模塊化、解耦合、易升級、可擴展等特點,可降低壽命周期成(chéng)本,縮短部署時(shí)間,獲得了工業界和國(guó)防部的支持。
目前,美軍具有代表性的開(kāi)放式系統架構有未來機載能(néng)力環境(Future Airborne Capability Environment,FACE)和開(kāi)放式任務系統(Open Mission Systems,OMS)。
2.1.1 未來機載能(néng)力環境
美國(guó)海軍提出未來機載能(néng)力環境概念,目标是建立一個公共操作環境,以支持軟件在任意機載電子系統上的移植和部署。該思想受到了移動設備中使用公共操作環境所帶來優勢的啓發(fā)。FACE通過(guò)制定一個嚴格的開(kāi)放标準集合,采用開(kāi)放式體系結構、集成(chéng)式模塊化航空電子系統和模塊化開(kāi)放系統分析方法,使航空電子系統内部應用程序之間的互操作性最大化。
未來機載能(néng)力環境(FACE聯盟)成(chéng)立于2010年,旨在爲所有軍用機載平台類型定義開(kāi)放的航空電子環境。FACE技術标準是一種(zhǒng)開(kāi)放的實時(shí)标準,用于使安全關鍵計算操作更加健壯、可互操作更強、便攜且安全。該标準的最新版本(2017年發(fā)布3.0版本)進(jìn)一步提升了應用程序的互操作性和可移植性,增強了在FACE組件之間交換數據的要求,包括正式指定的數據模型,并強調定義标準的通用語言要求。通過(guò)使用标準接口,該開(kāi)放标準實現了系統和組件之間的互操作性以及接口重用。圖6是FACE的軟件架構,共分爲可移植組件單元、傳輸服務單元、平台特定服務單元、輸入輸出服務單元以及操作系統單元。
在航空電子系統中使用開(kāi)放标準的标準化具有以下幾個方面(miàn)的優勢:(1)降低FACE系統開(kāi)發(fā)和實施成(chéng)本(2)使用标準接口將(jiāng)導緻功能(néng)的重用(3)跨多個FACE系統和供應商的應用程序的可移植性(4)采購符合FACE标準的産品。 
圖6 FACE架構
2.1.2 開(kāi)放式任務系統
美國(guó)空軍發(fā)起(qǐ)了開(kāi)放式任務系統計劃,旨在開(kāi)發(fā)一種(zhǒng)非專有的開(kāi)放式系統架構。OMS項目由來自政府、工業界和學(xué)術界成(chéng)員組成(chéng),正在積極協調新興OMS标準的制定,包括多個機載平台和傳感器采集程序,以及無人機系統(UAS)指揮和控制計劃(UCI)和通用任務控制中心(CMCC)。
OMS以及其他OSA工作的目标是确定新的采購和架構方法,以降低開(kāi)發(fā)和生命周期成(chéng)本,同時(shí)提供升級和擴展系統功能(néng)的可行途徑。由美國(guó)空軍開(kāi)發(fā)的開(kāi)放式任務系統(OMS)标準在其定義中利用商業開(kāi)發(fā)的面(miàn)向(xiàng)服務的體系結構(SOA)概念和中間件。空軍正在尋求擴展OMS标準的能(néng)力,以促進(jìn)航空電子系統的快速發(fā)展。UCS OMS參考架構建立了面(miàn)向(xiàng)服務的基本設計模式和原則以及關鍵接口和模塊。航空電子系統的功能(néng)被(bèi)表征爲一組服務和一組客戶。在某些情況下,程序或系統可以是客戶端和服務。OMS标準定義了客戶端和服務的基本行爲以及用于進(jìn)入和退出系統的航空電子服務總線(ASB)協議,支持測試,容錯,隔離和身份驗證。
在SoSITE項目的最新試驗中,使用了臭鼬工廠開(kāi)發(fā)的複雜組織體開(kāi)放式系統架構(E-OSA)任務計算機版本2(EMC2),即所謂的“愛因斯坦盒”,如圖7所示。洛克希德·馬丁公司開(kāi)發(fā)的E-OSA兼容了美空軍OMS标準。“愛因斯坦盒”可爲系統之間的通信提供了安全保護功能(néng),在將(jiāng)相關能(néng)力部署到操作系統之前,“愛因斯坦盒”能(néng)夠确保快速而安全的實驗。“愛因斯坦盒”不僅是一個通信網關,它可被(bèi)比作一部智能(néng)手機,能(néng)夠運行很多不同的應用程序,具備實現動态任務規劃、ISR以及電子戰的能(néng)力。
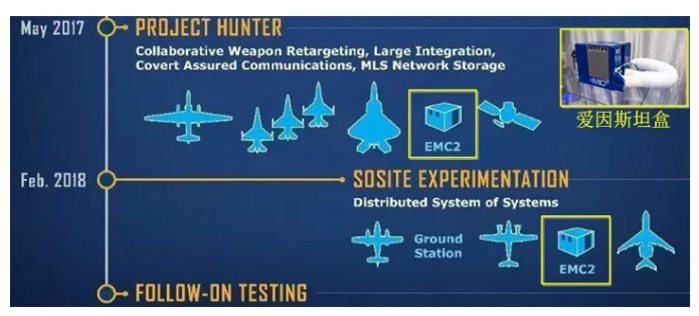
圖7 使用EMC2的美軍試驗
2.2 無人機控制權限交接
不同無人機控制權限交接流程和交接指令差異較大,STANAG 4586通用控制标準目前并不涵蓋無人機控制權限交接的指令,目前在無人機控制權限交接上缺乏統一的标準[4,5]。無人機控制權限交接指令主要分成(chéng):申請權限請求、釋放權限請求、搶權請求、同意、不同意和确認等。
有人/無人機協同作戰在控制權交接上可大緻分成(chéng)空地交接和空空交接兩(liǎng)種(zhǒng)模式。空中不同的有人機平台之間對(duì)無人機控制權限進(jìn)行交接,主要發(fā)生在存在有人機加入和退出有人/無人機協同作戰體系時(shí),如有人機油料不足需要返航或者被(bèi)敵方擊中,需要將(jiāng)無人機控制權限交給其他有人機。有人機與地面(miàn)控制站之間對(duì)無人機的控制權限進(jìn)行交接,主要發(fā)生在執行任務前和任務完成(chéng)後(hòu),無人機起(qǐ)降過(guò)程還(hái)需地面(miàn)控制站作爲主控方,另外當發(fā)現無人機出現異常情況,有人機操作不及時(shí)時(shí),也需將(jiāng)無人機控制權限交給地面(miàn)控制站。
2.3 協同任務分配和航路智能(néng)規劃
針對(duì)有/無人平台編隊協同作戰任務過(guò)程中的任務自規劃、航路自調整、目标自分配等要求和特點[6],利用戰術驅動的任務自動分解與角色自主分配技術,在有人機上進(jìn)行強實時(shí)戰術驅動的任務自動解算與有人/無人平台角色智能(néng)化分配,自主生成(chéng)多種(zhǒng)可行的任務規劃方案,爲有人機操作人員選擇最佳方案提供輔助決策支撐。
如圖8所示,利用有人/無人協同航路臨機規劃技術,基于戰場環境、作戰态勢和平台狀态的航路在線自動計算與優化,提供多種(zhǒng)航路規劃方案。建立任務自主分配策略和輔助決策知識庫、航路自規劃與自适應飛行控制策略和輔助決策知識庫,提高有/無人編隊協同作戰的自主化規劃能(néng)力。

圖8 協同任務分配和航路智能(néng)規劃
2.4 綜合識别和情報融合
針對(duì)不同的有人/無人協同作戰任務,有人機和無人機攜帶的載荷類型差異較大,特别是無人機可攜帶的載荷包括雷達、可見光、紅外、多光譜/超光譜、電子偵察等,通常情況下無人機同時(shí)攜帶多種(zhǒng)類型載荷進(jìn)行探測,多個無人機平台將(jiāng)會(huì)采集大量多源情報數據。爲了提高遠距離目标識别的置信度,增強态勢感知、改善目标檢測,提高精确定位,提高生存能(néng)力,不同平台多模态傳感器情報的綜合識别和融合將(jiāng)會(huì)是有人/無人協同的關鍵技術之一。目前,深度神經(jīng)網絡在圖像/視頻的目标檢測和識别領域取得廣泛的應用,比傳統方法具有明顯優勢。借助人工智能(néng)技術,通過(guò)對(duì)多源情報數據進(jìn)行綜合識别和情報融合,形成(chéng)戰場統一态勢信息,爲決策過(guò)程提供快速、精确、可靠的依據。
3 典型作戰場景和作戰流程
以空中預警機爲例,下面(miàn)對(duì)有人/無人協同作戰典型作戰場景進(jìn)行介紹。如圖9所示,預警機實現有人/無人編隊的指揮控制與引導,由預警機完成(chéng)信息的綜合處理、聯合編隊的戰術決策、任務管理以及對(duì)無人機的指揮控制,由無人機完成(chéng)自主飛行控制、戰場态勢感知以及對(duì)空/地/海目标的最終打擊[7]。有人戰機充當體系中的通信節點,將(jiāng)有人/無人作戰編隊嵌入到整個對(duì)抗體系中,從而實現戰場的信息共享、可用資源的統一調度及作戰任務的綜合管理。
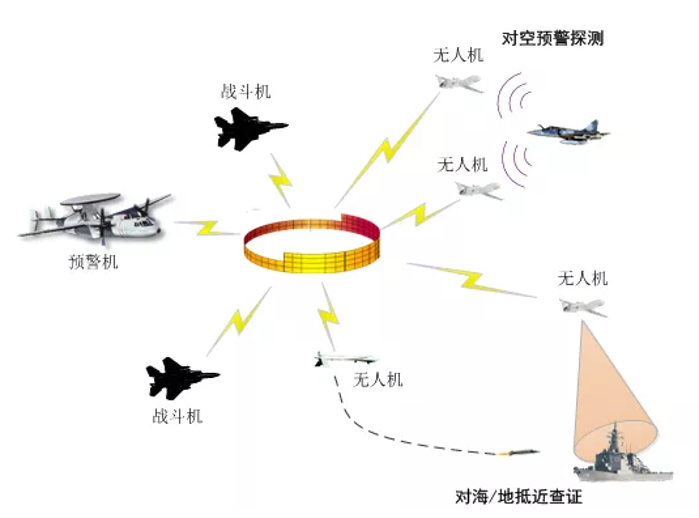
圖9 有人/無人機協同典型作戰場景
有人/無人機協同作戰典型作戰流程如圖10所示,共分成(chéng)任務準備階段、任務執行階段和任務結束階段。
(1)任務準備階段。
分别完成(chéng)對(duì)有人機和無人機的任務/航路裝訂。有人機和無人機分别起(qǐ)飛,并飛至交接區域,無人機地面(miàn)控制站將(jiāng)無人機的控制權限移交給有人機,在有人機的指揮下,共同飛往任務區域。
(2)任務執行階段。
有人機根據當前戰場态勢信息,分配各個無人機的作戰任務,并對(duì)無人機的航線和傳感器進(jìn)行規劃。無人機在有人機的指揮下,按照規劃結果執行飛行任務,抵達目标區域後(hòu),傳感器開(kāi)機。有人機上的操作人員對(duì)無人機傳感器進(jìn)行控制,無人機負責采集并回傳目标情報至有人機。通過(guò)多源情報綜合處理,形成(chéng)新的态勢信息,爲有人機的進(jìn)一步決策提供依據。
(3)任務結束階段。
任務執行完成(chéng)後(hòu),有人機指揮無人機抵達交接區域,有人機將(jiāng)無人機的控制權限移交給無人機地面(miàn)控制站。有人機和無人機執行各自的任務或返航。

圖10 有人/無人機協同典型作戰流程
4.對(duì)有人/無人機協同領域發(fā)展的展望
有人/無人機協同作戰是未來重要的發(fā)展方向(xiàng),在對(duì)當前美軍有人/無人協同項目和關鍵技術分析和理解的基礎上,可預見未來該領域將(jiāng)會(huì)逐漸向(xiàng)以下方向(xiàng)發(fā)展。
(1)“即來即用”的大規模無人機控制
随著(zhe)未來無人機自主能(néng)力不斷提升,隻在重大決策點需要人爲介入,無人機操作人員控制的無人機數量將(jiāng)大幅提升。另外,人機交互的手段將(jiāng)越來越豐富,對(duì)無人機的控制效率將(jiāng)得到本質改善。有人機通過(guò)通用指令對(duì)不同型号、不同類型的無人機進(jìn)行控制,無人機的技術體制和通信也能(néng)夠全面(miàn)兼容,實現有人/無人機協同作戰體系中作戰平台的無縫進(jìn)入和離開(kāi)。
(2)情報處理的智能(néng)化
針對(duì)不同平台、不同傳感器采集的數據,通過(guò)更加智能(néng)化的手段,對(duì)目标進(jìn)行精确檢測、識别、跟蹤,融合生成(chéng)統一态勢信息。
(3)更快、更低成(chéng)本的體系能(néng)力集成(chéng)
全面(miàn)采用開(kāi)放式體系架構,縮短有人/無人機協同作戰能(néng)力集成(chéng)周期和裝備采購成(chéng)本,同時(shí)將(jiāng)有人/無人機的協同作戰快速擴展到與無人車、無人船和無人艇的協同,形成(chéng)更全面(miàn)的體系作戰能(néng)力。
結 語
本文深入分析了近些年美軍在有人/無人機協同領域的項目,提出了有人/無人機協同需要發(fā)展的關鍵技術,并對(duì)有人/無人機協同作戰的典型作戰場景和作戰流程進(jìn)行研究,最後(hòu)對(duì)有人/無人機協同作戰領域未來發(fā)展進(jìn)行了展望,并分析了與網絡信息體系的關系。
【參考文獻】
[1] United States Department of Defense. Unmanned Systems Integrated Roadmap FY2017-2042. Report, 2018.
[2] 李磊,王彤,蔣琪. 美國(guó)CODE項目推進(jìn)分布式協同作戰發(fā)展[J]. 無人系統技術, 2018, (3): 63-70.
[3] 申超,李磊,吳洋,等. 美國(guó)空中有人/無人自主協同作戰能(néng)力發(fā)展研究[J]. 戰術導彈技術, 2018, (1): 22-27.
[4] STANAG 4586 Ed.3 Nov 2012, Standard Interfaces of UAV Control System (UCS for NATO UAV Interoperability, NATO Standardization Agency (NSA), 2012.
[5] Mário Monteiro Marques, STANAG 4586 –Standard Interfaces of UAV Control System (UCS) for NATO UAV Interoperability.
[6] 楊帆,董正宏. 有人/無人平台協同技術與行動模式研究[J]. 國(guó)防科技, 2018, 39(4): 57-62.
[7] 孫曉聞. 無人/有人機協同探測/作戰應用研究[J]. 中國(guó)電子科學(xué)研究院學(xué)報, 2014, 9(4): 5-8.